
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
Tags
- 전자공학
- 마이컴
- terminal
- 초보개발자
- RTOS
- PCB
- IoT
- TM4C123
- 아트웍
- easyeda
- 임베디드시스템
- MAC OS
- Developer
- bldc
- 7 세그먼트
- mcu
- CCS
- 모두의연구소
- EMBEDDED
- Arm
- GPIO
- TM4C123GXL
- m4
- Embedded System
- Programming
- St
- TI
- 임베디드
- 8051
- JLCPCB
Archives
- Today
- Total
목록robotic arm (1)
Engineering Agit
 [Robotic Arm project] - 01
[Robotic Arm project] - 01
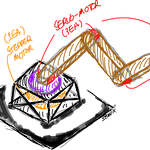
◈ Introduction to the project 본 카테고리 '2019 Robotic Arm project'는 2019년도 하반기에 진행되었던 개인 프로젝트의 내용을 담고 있다. 1. Hardware specification Robotic arm의 구조는 위의 초안 그림처럼 4-DoF이다. 1 개의 stepper motor와 3개의 servo motor가 사용된다. 이를 기구학적으로 분석하기 위해서 FBD(Free Body Diagram)를 그렸으며 아래의 그림과 같다. 이를 그리기 위해 DH(Denavit-Hartenburg) convention을 사용하였다. W = Robotic arm이 드는 물체의 무게 w1, w2 = 서보모터의 무게. 동일한 서보를 사용할 것이므로 동일 (55g) m1, m..
Projects/2019 Robotic Arm project
2020. 8. 22. 15:18